Vibrissal-Responsive Neurons
Experimental data of a rat whisking to explore its environment
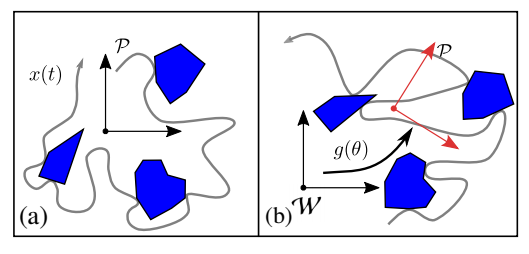
Simulated exploration strategies for an agent to localize itself in its environment
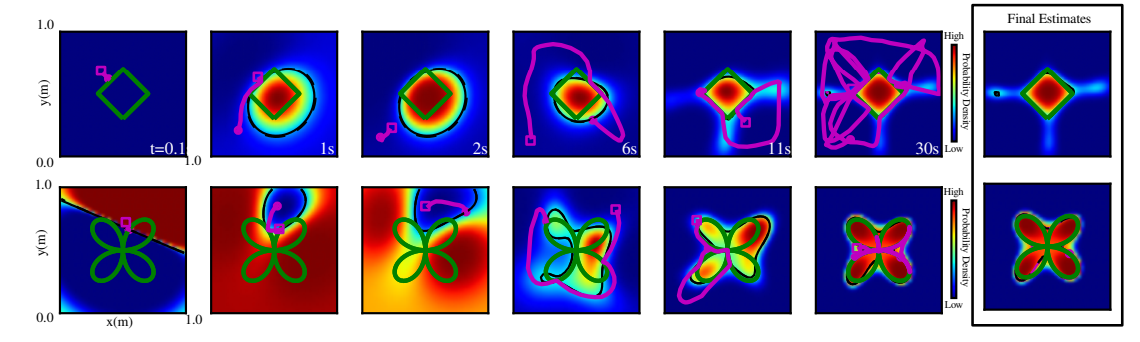
Ergodic exploration using binary sensing for shape estimation
We see because retinal ganglion cells respond to light. We hear because spiral ganglion cells respond to sound. We feel because primary somatosensory neurons respond to touch. But what is touch? Whereas light and sound can be characterized by physical parameters (amplitude, frequency, phase, and polarization), the mechanics of touch, and the manner in which primary sensory neurons encode the parameters of touch, are largely unquantified. This is a glaring gap within the entire field of somatosensation, and it occurs because mechanics are difficult to quantify. To close this gap we will use the rat vibrissal (whisker) system as a model to directly relate the responses of primary sensory neurons to the quantified mechanics of touch. Paralleling the increased use of rodents in genetic and optogenetic research, the rodent vibrissal array has become an increasingly important model for the study of touch and sensorimotor integration.
Collaborators
Mitra Hartmann, Northwestern University
Publications
Ergodic exploration using binary sensing for non-parametric shape estimation
I. Abraham, A. Prabhakar, M. Hartmann, and T. D. Murphey
IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 827–834, 2017. PDF, Video
Funding
This project is funded by the National Institutes of Health: Coding Properties of Vibrissal-Responsive Trigeminal Ganglion Neurons.
Other Projects
Active Learning and Data-Driven Control
Active Perception in Human-Swarm Collaboration
Algorithmic Matter and Emergent Computation
Control for Nonlinear and Hybrid Systems
Cyber Physical Systems in Uncertain Environments
Harmonious Navigation in Human Crowds
Information Maximizing Clinical Diagnostics
Reactive Learning in Underwater Exploration
Robot-Assisted Rehabilitation
Software-Enabled Biomedical Devices