Robot-Assisted Rehabilitation
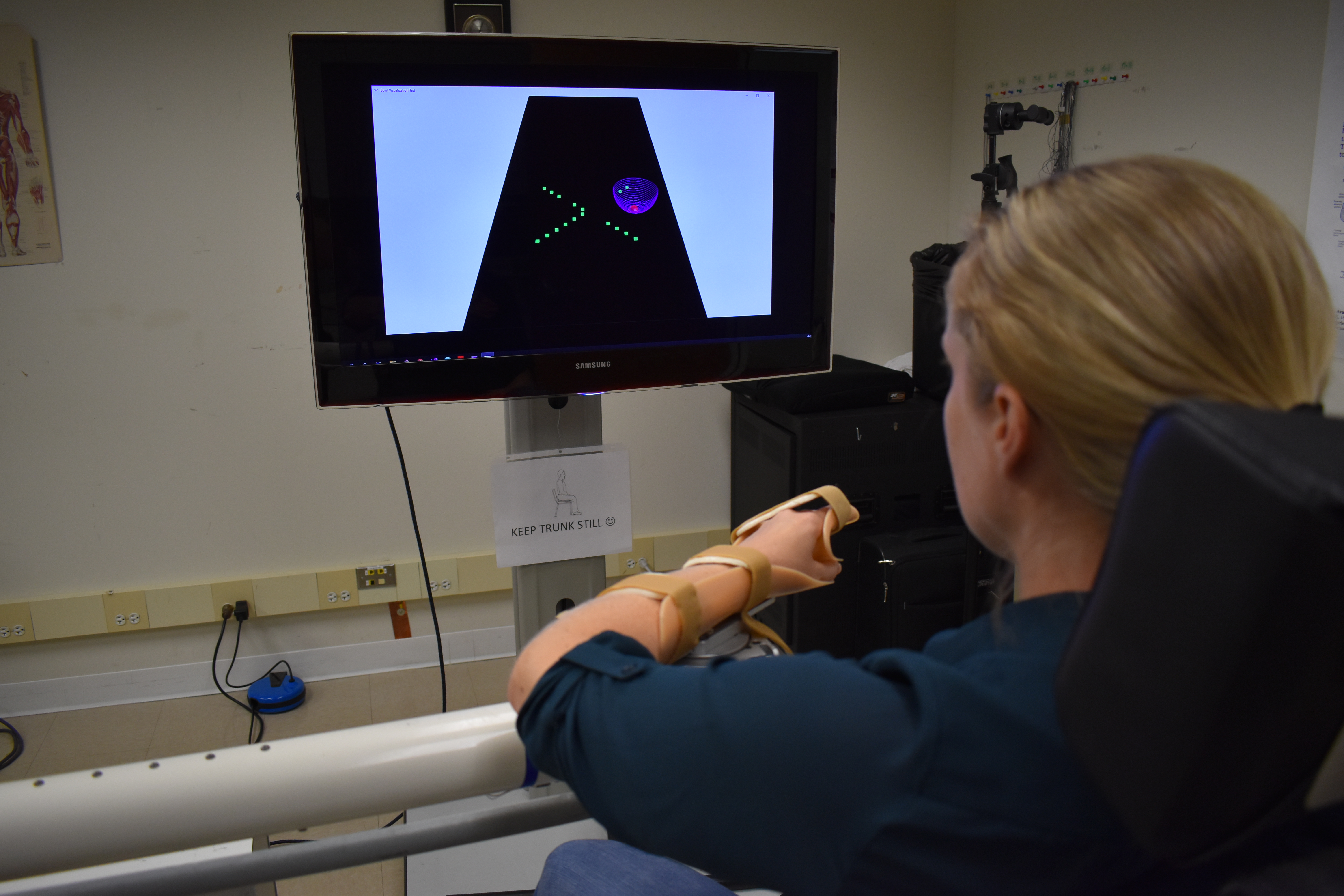
A virtual task and upper-limb assistive device
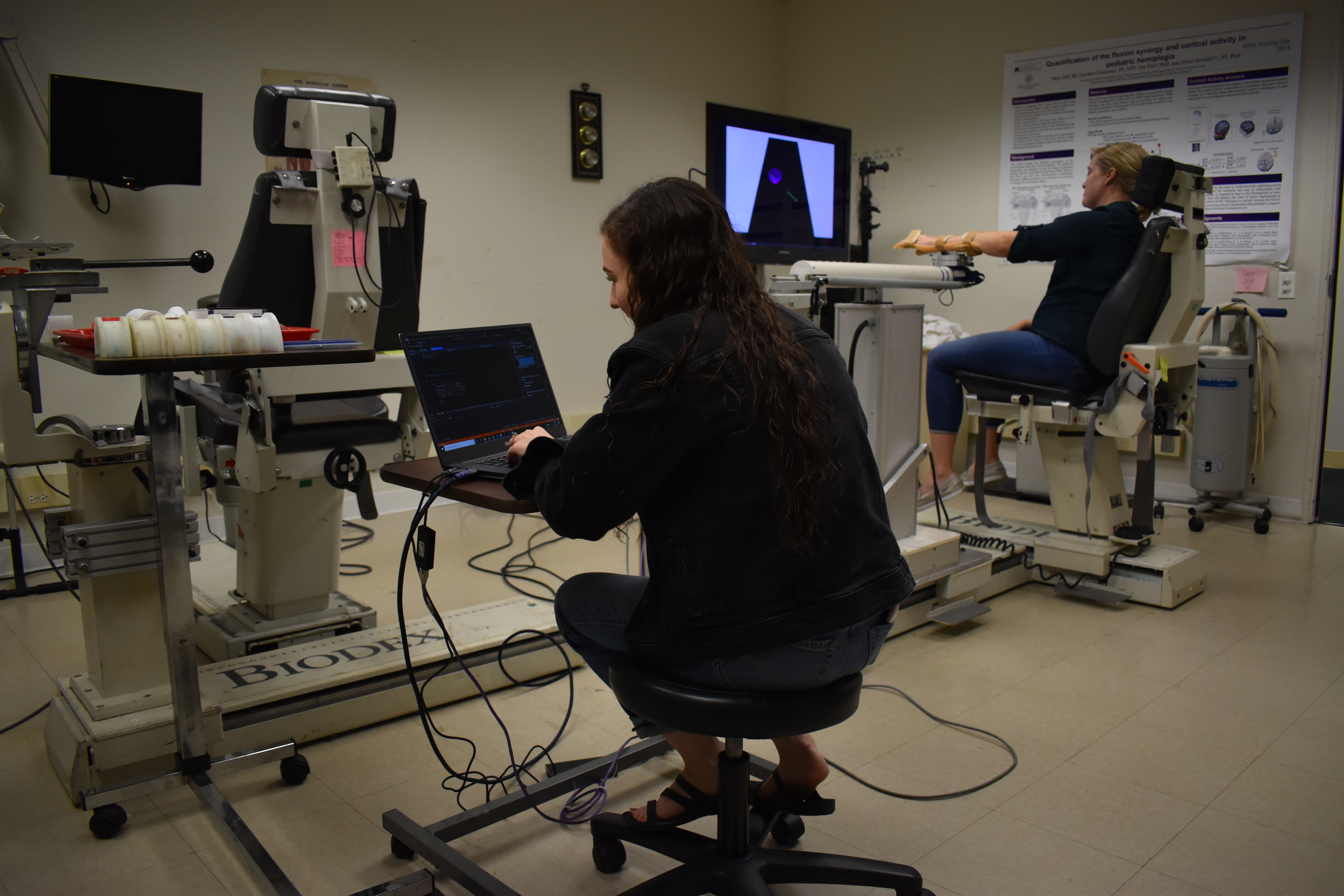
Students experimenting with software-enabled biomedical devices
Robot-assisted therapies offer a unique opportunity to personalize treatment by adapting in real time to the individual’s needs and capabilities. In this work we aim to evaluate the benefits of online performance-based adaptation of task goals and levels of assistance during intervention protocols.
People
Ola Kalinowska (Ph.D. Student)
Katie Fitzsimons (Ph.D. Student)
Kyra Rudy (Ph.D. Student)
Collaborators
Julius Dewald, Northwestern University
Publications
Shoulder abduction loading affects motor coordination in individuals with chronic stroke, informing targeted rehabilitation
A. Kalinowska, K. Rudy, M. Schlafly, K. Fitzsimons, J. Dewald and T. D. Murphey
IEEE RAS/EMBS Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob), 2020. PDF
Other Projects
Active Learning and Data-Driven Control
Active Perception in Human-Swarm Collaboration
Algorithmic Matter and Emergent Computation
Control for Nonlinear and Hybrid Systems
Cyber Physical Systems in Uncertain Environments
Harmonious Navigation in Human Crowds
Information Maximizing Clinical Diagnostics
Reactive Learning in Underwater Exploration
Robot-Assisted Rehabilitation
Software-Enabled Biomedical Devices