Control for Nonlinear and Hybrid Systems
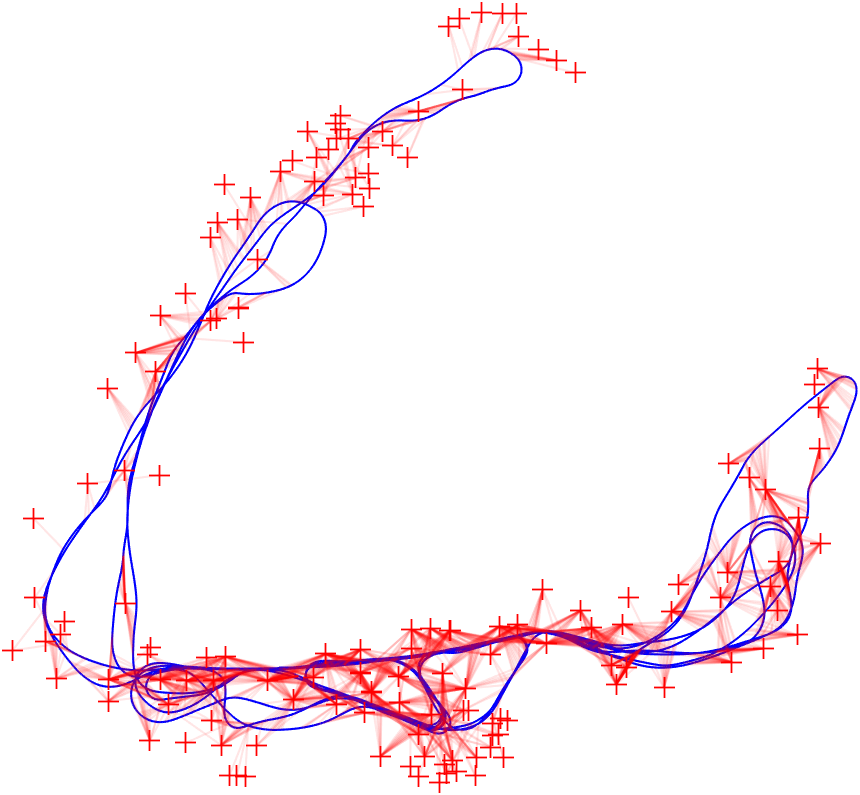
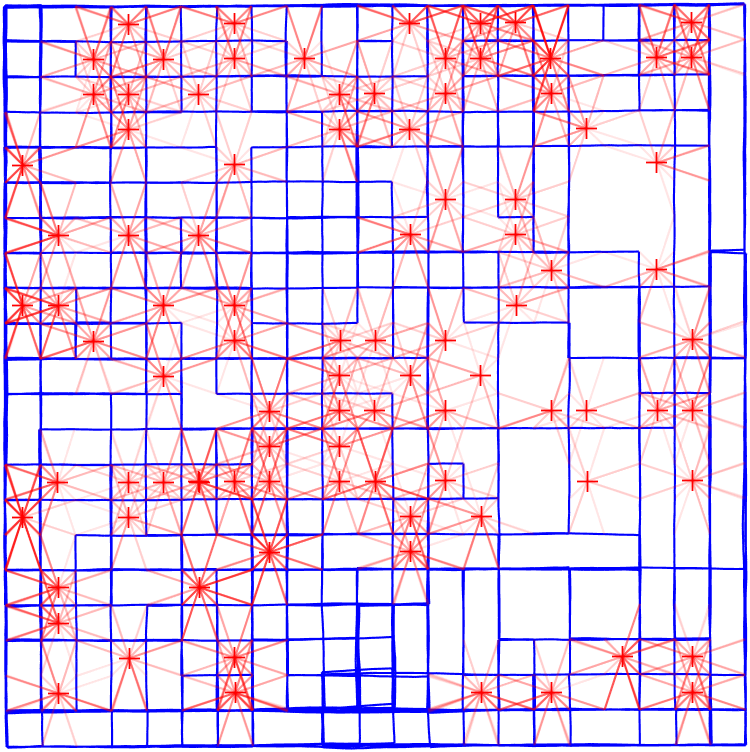
This project is developing computationally efficient optimal and semi-optimal control and estimation methods. The research is based on the prior development of sequential action control, a numerical iterative optimal control technique that often finds near-optimizers in a single iteration. Using this technique as a starting point, we are interested in developing numerical techniques that can run in real-time for high dimensional nonlinear systems with provable guarantees of stability and near optimality. The key starting point for the work is that sequential action control is a very simple control approach, only relying on a single control vector calculation at any given time, suggesting that near optimal solutions may be very simple to compute. Goals for the research include theoretical guarantees, numerical methods, and experiments. Thus far we have been able to show that the existence of these optimizers depends on local nonlinear controllability. Moreover, keeping track of the computations as one goes leads to stability guarantees. Lastly, some of the geometric ideas generated in this work have produced very efficient methods for pose graph optimization, often an important component of simulataneous localization and mapping (SLAM) algorithms.
People
Taosha Fan (Ph.D. Student)
Giorgos Mamakoukas (Ph.D. Student)
Publications
CPL-SLAM: Efficient and Certifiably Correct Planar Graph-Based SLAM Using the Complex Number Representation
T. Fan, H. Wang, M. Rubenstein, and T. D. Murphey
IEEE Transactions on Robotics, 2020. PDF
Majorization Minimization Methods to Distributed Pose Graph Optimization with Convergence Guarantees
T. Fan and T. D. Murphey
IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2020. PDF
Generalized proximal methods for pose graph optimization
T. Fan and T. D. Murphey
International Symposium on Robotics Research (ISRR), 2019. PDF
Efficient and guaranteed planar pose graph optimization using the complex number representation
T. Fan, H. Wang, M. Rubenstein, and T. D. Murphey
IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2019. Winner of ABB Best Student Paper Award. PDF
Feedback synthesis for underactuated systems using sequential second-order needle variations
G. Mamakoukas, M. Maciver, and T. D. Murphey
International Journal of Robotics Research, vol. 37, no. 13-14, pp. 1826–1853, 2019. PDF
Efficient computation of higher-order variational integrators in robotic simulation and trajectory optimization
T. Fan, J. Schultz, and T. D. Murphey
Workshop on the Algorithmic Foundations of Robotics (WAFR), 2018. PDF, Appendix, Video
Superlinear convergence using controls based on second-order needle variations
G. Mamakoukas, M. MacIver, and T. D. Murphey
IEEE Int. Conf. on Decision and Control (CDC), pp. 4301–4308, 2018. PDF
Feedback synthesis for controllable underactuated systems using sequential second order actions
G. Mamakoukas, M. MacIver, and T. D. Murphey
Robotics: Science and Systems Proceedings, 2017. PDF, Video
Decentralized and recursive identification for cooperative manipulation of unknown rigid body with local measurements
T. Fan, H. Weng, and T. D. Murphey
IEEE Int. Conf. on Decision and Control (CDC), pp. 2842–2849, 2017. PDF
Online feedback control for input-saturated robotic systems on Lie groups
T. Fan and T. D. Murphey
Robotics: Science and Systems Proceedings, 2016. PDF
Structured linearization of discrete mechanical systems on Lie groups: a synthesis of analysis and control
T. Fan and T. D. Murphey
IEEE Int. Conf. on Decision and Control (CDC), pp. 1092 – 1099, 2015. PDF
Funding
This project is funded by the National Science Foundation–Civil and Mechanical Systems: Stability and Optimality Properties of Sequential Action Control for Nonlinear and Hybrid Systems.
Other Projects
Active Learning and Data-Driven Control
Active Perception in Human-Swarm Collaboration
Algorithmic Matter and Emergent Computation
Control for Nonlinear and Hybrid Systems
Cyber Physical Systems in Uncertain Environments
Harmonious Navigation in Human Crowds
Information Maximizing Clinical Diagnostics
Reactive Learning in Underwater Exploration
Robot-Assisted Rehabilitation
Software-Enabled Biomedical Devices