























About
In the Interactive and Emergent Autonomy Lab, our research focuses on computational methods in data-driven control, information theory in physical systems, and embodied intelligence. We investigate how both autonomous systems and biological systems interact with their environments (and, in some cases, with each other) to learn and improve their behaviors. This work often involves mathematical modeling, development of new mathematical tools, algorithmic implementation and programming, and experimentation.
News
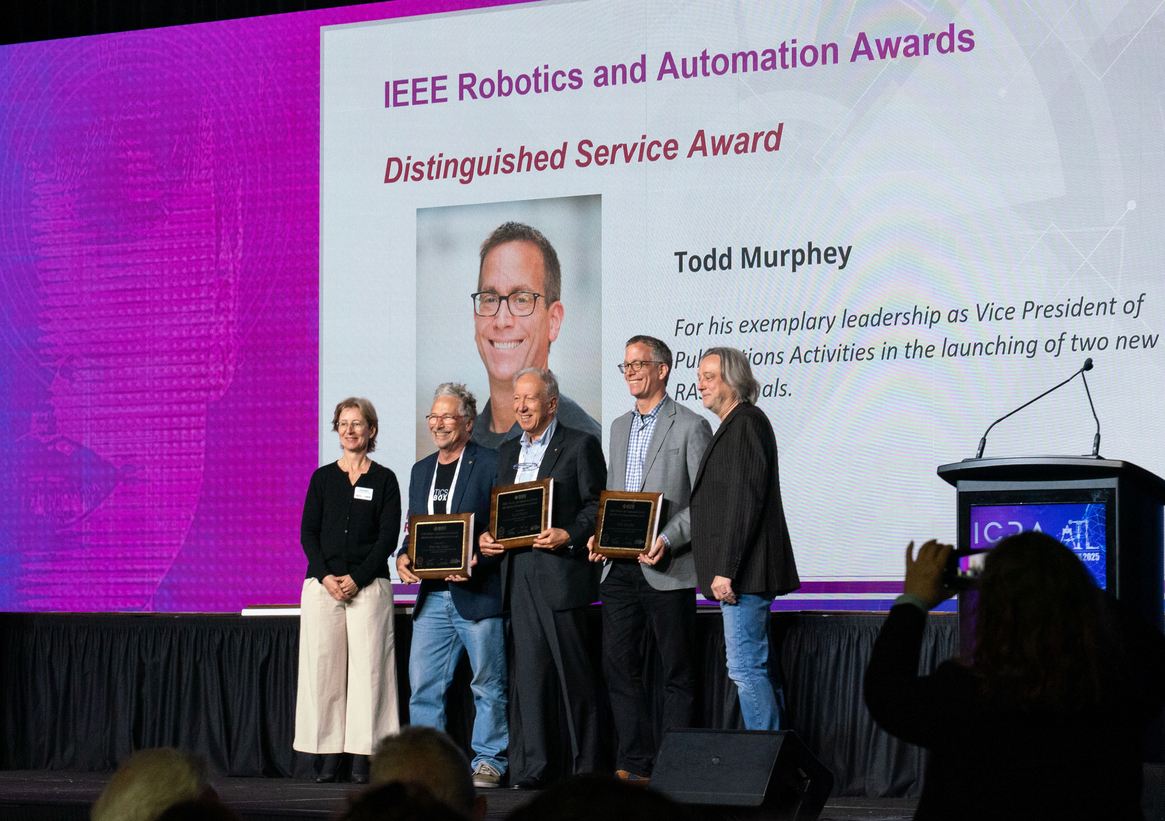
May 24, 2025 Todd receives the IEEE RAS Distinguished Service Award
Nov 13, 2024 Jueun Kwon joins the lab
May 2, 2024 New paper accepted to Nature Machine Intelligence
Feb 15, 2024 New paper accepted to PNAS Nexus
Dec 11, 2023 Zixin Zhang joins the lab
Sep 30, 2023 New IROS paper on automatic gait generation for soft quadrupeds
May 25, 2023 Ola defends Ph.D. thesis
May 3, 2023 New review paper on embodied communication out at Annual Review of Control, Robotics, and Autonomous Systems
Jan 3, 2023 Ayush Gaggar joins the lab
October 2, 2022 New emergent communication paper out at Annual Meeting of the Cognitive Science Society
September 25, 2022 New point set registration paper out at International Symposium of Robotics Research
June 20, 2022 New embodied active learning paper out on Nature Communications
June 2, 2022 New hybrid reinforcement learning paper out on IJRR
May 24, 2022 Tommy received 2022 Northwestern University Presidential Fellowship
January 13, 2022 Taosha defends Ph.D. thesis
December 23, 2021 New paper on memristor circuits for microrobotics
October 7, 2021 New Nature paper on mechanical computing
Recent Papers
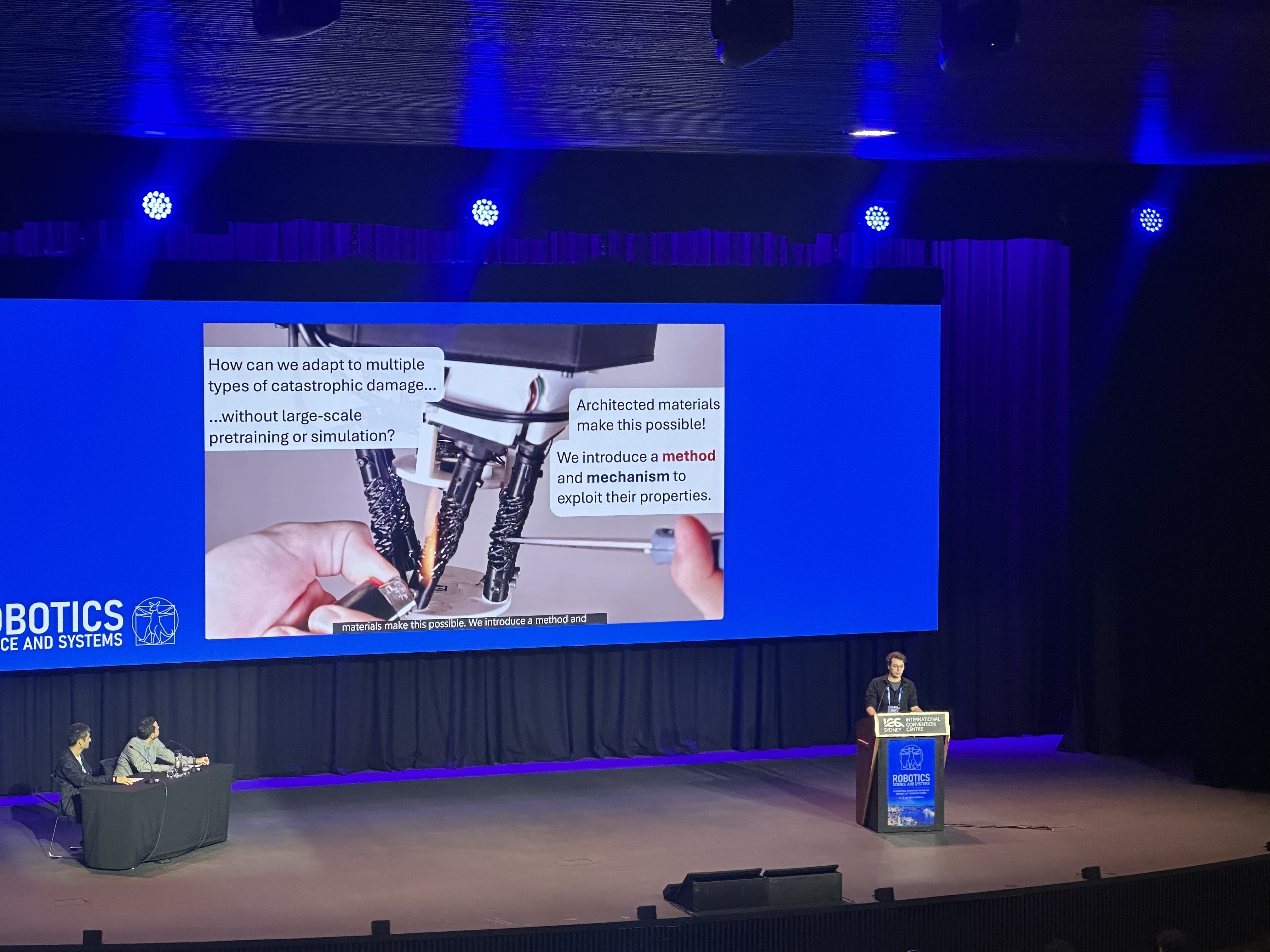
Damage Adaptation in Seconds for Architected Materials
J. Avtges*, J. Ketchum*, H. Young, T. Kim, R. L. Truby, T. D. Murphey (*equal contribution)
Robotics: Science and Systems (RSS), 2026. PDF, Website
Manufacturing Micro-Patterned Surfaces with Multi-Robot Systems
A. T. Taylor, M. Landis, P. Guo, T. Murphey
IEEE International Conference on Robotics and Automation (ICRA), 2026. PDF
Volumetric Ergodic Control
J. Kwon, M. M. Sun, T. D. Murphey
IEEE International Conference on Robotics and Automation (ICRA), 2026. PDF
Koopman Operators in Robot Learning
L. Shi, M. Haseli, G. Mamakoukas, D. Bruder, I. Abraham, T. Murphey, J. Cortés, K. Karydis
IEEE Transactions on Robotics (T-RO), 2026. PDF
Real-Time Reinforcement Learning for Dynamic Tasks with a Parallel Soft Robot
J. Avtges, J. Ketchum, M. Schlafly, H. Young, T. Kim, A. Pinosky, R. L. Truby, T. D. Murphey
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. PDF
Sample-Efficient Online Control Policy Learning with Real-Time Recursive Model Updates
Z. Zhang, J. Avtges, T. D. Murphey
Conference on Robot Learning (CoRL), 2025. PDF
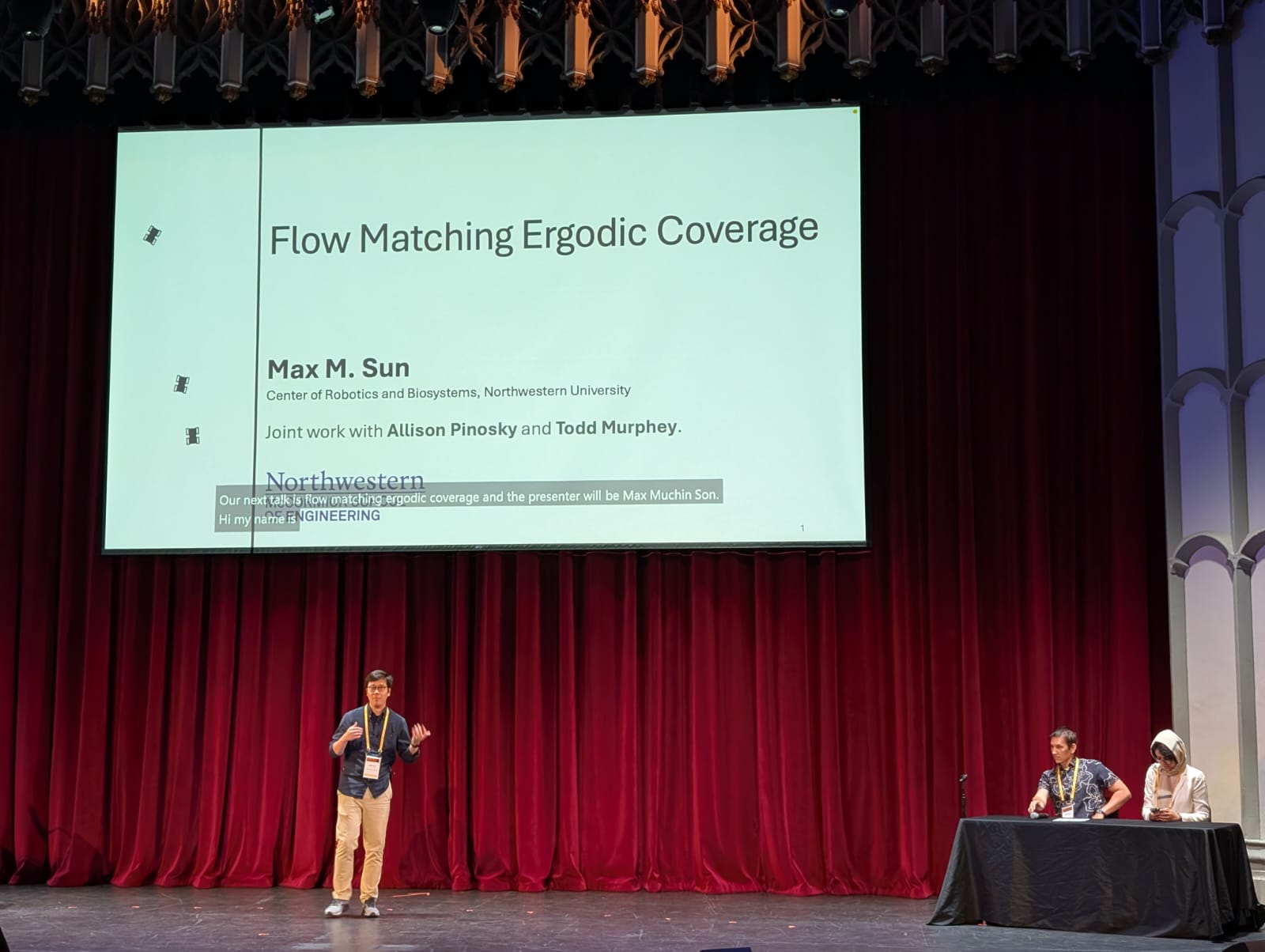
Flow Matching Ergodic Coverage
M. M. Sun, A. Pinosky, T. D. Murphey
Robotics: Science and Systems (RSS), 2025. PDF
Data Augmentation for NeRFs in the Low Data Limit
A. Gaggar, T. D. Murphey
IEEE International Conference on Robotics and Automation (ICRA), 2025. PDF
Inverse Mixed Strategy Games with Generative Trajectory Models
M. M. Sun, P. Trautman, T. D. Murphey
IEEE International Conference on Robotics and Automation (ICRA), 2025. PDF