Cyber-Physical Systems in Uncertain Environments
Most cyber-physical systems have operated in comparatively benign environments, often engineered to meet the needs of the system. For instance, in many settings robots operate in closed-off environments in manufacturing. However, as these systems are deployed in increasingly isolated environments (such as search and rescue efforts, automation in surgical devices, collaborative manufacturing) these robots will need to operate while reasoning about substantial uncertainty. Moreover, actions taken by the system impact that uncertainty. The proposed work will develop algorithms that enable a cyber-physical system to reason about what actions it must take to manage its uncertainty. A simple example of this is understanding that one must look behind and under things when searching for an object. The goal of this project is to automate the process of managing that uncertainty, however it arises. For instance, interacting with humans (such as physically interacting with a person while assisting her motion, or tracking a person during a search effort) involves uncertainty about what the person is going to do. Enabling a robotic system to actively test a person's intent, and then act according to her subsequent behavior, is key to the robot's ability to be an effective partner. This essential point, that action on the part of a cyber-physical system can be used to explicitly manage its understanding of the world, is the core purpose of the proposed work.
People
Allie Pinosky (Ph.D. Student)
Kyra Rudy (Ph.D. Student)
Milli Schlafly (Ph.D. Student)
Collaborators
Brenna Argall, Northwestern University
Publications
Active learning of dynamics for data-driven control using Koopman operators
I. Abraham and T. D. Murphey
IEEE Transactions on Robotics, 2019. PDF, Code
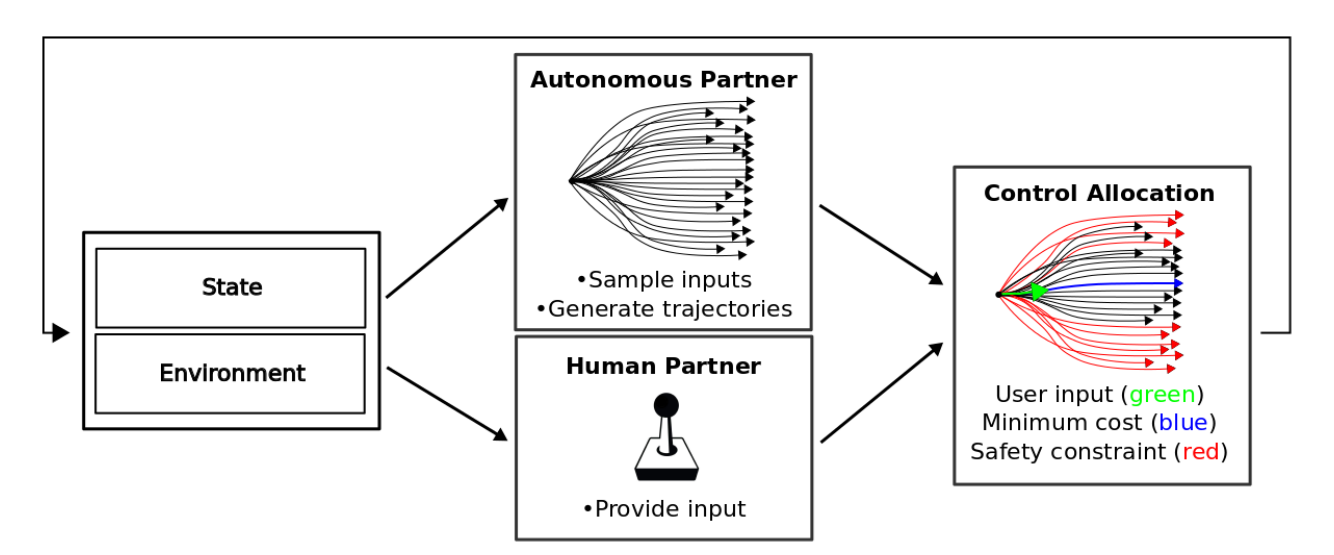
Highly parallelized data-driven MPC for minimal intervention shared control
A. Broad, T. D. Murphey, and B. Argall
Robotics: Science and Systems Proceedings, 2019. PDF
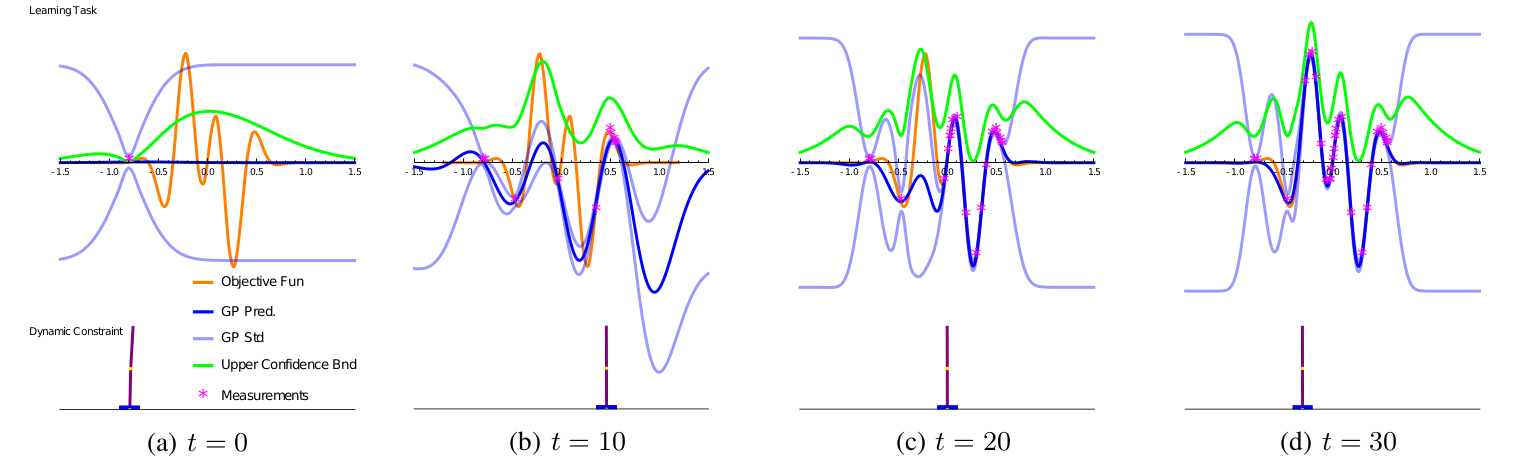
Active area coverage from equilibrium
I. Abraham, A. Prabhakar, and T. D. Murphey
Workshop on the Algorithmic Foundations of Robotics (WAFR), 2018. PDF, Appendix, Video
Operation and imitation under safety-aware shared control
A. Broad, T. D. Murphey, and B. Argall
Workshop on the Algorithmic Foundations of Robotics (WAFR), 2018. PDF
Funding
This project is funded by the National Science Foundation–Cyber-Physical Systems: Information based Control of Cyber-Physical Systems operating in uncertain environments.
Other Projects
Active Learning and Data-Driven Control
Active Perception in Human-Swarm Collaboration
Algorithmic Matter and Emergent Computation
Control for Nonlinear and Hybrid Systems
Cyber Physical Systems in Uncertain Environments
Harmonious Navigation in Human Crowds
Information Maximizing Clinical Diagnostics
Reactive Learning in Underwater Exploration
Robot-Assisted Rehabilitation
Software-Enabled Biomedical Devices